At your average container port, two sets of cranes are at work: loading cranes, which lift the containers on and off ships, and stacking cranes, which move containers around storage areas. Shuttle trucks move boxes between the two. And it's this process of unload, shuttle, and stack that ports now target for efficiency gains by automating the process
The trend is for the automated movement of containers around the terminal area. In addition, crane operators will work from a central control room away from the stacks, and each operator will be able to control more than one crane. The process of unloading and loading a ship at a container terminal may be described as follows: when a ship arrives at the port, the containers have to be taken off the ship. This is done by manned Quay Cranes (QCs), which take the containers from the ship's hold and the deck. Next, the QCs put the containers on vehicles, like automated guided vehicles (AGVs). After receiving a container, the AGV moves to the stack. This stack consists of a number of lanes where containers can be stored for a certain period. These lanes are served by, for example, automatically controlled Automated Stacking Cranes (ASCs). When an AGV arrives at a lane, the ASC takes the container off the AGV and stores it in the stack.
After a certain period the containers are retrieved from the stack by the ASCs and transported by the AGVs to transportation modes such as barges, deep-sea ships, trucks or trains. This process is also be executed in reverse order, to load containers on a ship. Pilotless automated guided vehicles (or AGVs) in terminals have been in operation since 1993. AGVs circulate in a cordoned-off area of the terminal, ferrying containers from the stacking area to the ship-loading cranes. Using top-mounted infrared eyes, GPS and other positioning technologies, the AGVs travel freely, connecting the container stacks and the loading cranes. The system allows work in fog that would otherwise have slowed or halted operations. The realisation of automation for the cranes at container terminals have been delayed compared with indoor service cranes. This is caused by various problems in the outdoor environment. For the quay side container handling crane, the main objection to achieving the automation is that the relative position of the ship to the crane could not be accurately determined due to the ship's rolling motion, etc. Transfer cranes in the container stock yard do not load/unload ships, and their automation is in a relatively easy environment compared with the quay side container cranes.
 |
|
The automation of the rubber-tyred gantry cranes (RTG) which are most extensively used in the terminal area must deal with the tyre behaviour, and automisation has not been realised yet. Automatic operation is achieved based on operation commands from the computer on the crane to which the commands are transmitted from the planning computer in the container terminal. Anti-skew and positioning technologies to deal with parallel swinging and skew swinging. The swing of the spreader and the suspended container includes parallel swinging and the skew swinging (in which the suspended container rotates as it swings). The automation of the rubber-tyred gantry cranes (RTG) which are most extensively used in the terminal area must deal with the tyre behaviour, and automisation has not been realised yet. Automatic operation is achieved based on operation commands from the computer on the crane to which the commands are transmitted from the planning computer in the container terminal. Anti-skew and positioning technologies to deal with parallel swinging and skew swinging. The swing of the spreader and the suspended container includes parallel swinging and the skew swinging (in which the suspended container rotates as it swings).
Parallel swing during the traverse movement is removed by controlling the acceleration/deceleration of the trolley, and the skew swing is removed by controlling the motion of the sheave truck device installed on the trolley. When the container spreader and the suspended container approach the target position in the traverse direction, the swing is stopped with high accuracy and the position is corrected by controlling the motion of the sheave truck.The most important point in automatic operation is to prevent the spreader and the suspended container from colliding with containers already stacked, even when traversing and the winding are simultaneously implemented. A stack height detection sensor is installed on the crane in order to automatically detect the stack height, and the shortest moving pass in which the spreader and the suspended container do not collide with the stacked containers in the yard is calculated based on the data.
CONTAINER TERMINAL VEHICLES
Vehicles such as lift trucks, fork lift trucks, reach stackers and container handing trucks are made in two versions. One version has the ability to lift fully laden containers and has a limited lift or reach capability. The other version is designed for empty containers only and has the capability to work on stacks in excess of 8 containers.
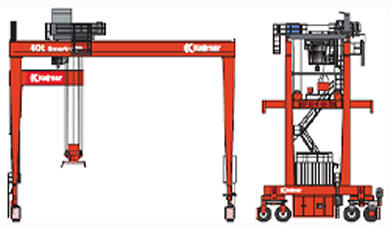
Rubber Tyred Gantry Crane.
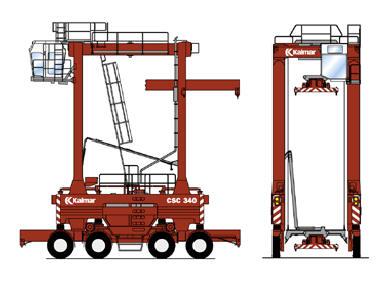
Straddle Carrier
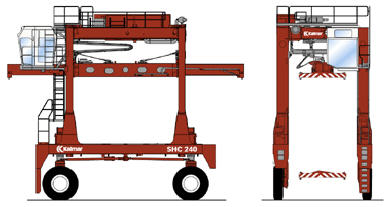
Shuttle Carrier
Fork Lift Truck
Reach Stacker
Ro-Ro Fork Lift Truck
Lift Truck
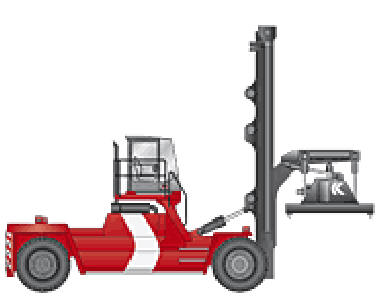
Top Pick Container Handler
Terminal Tractor